World Models · Diffusion Models · Robotics
NVIDIA OmniDreams: Real-Time Generative World Model for AV Simulation
OmniDreams is a Cosmos-based generative driving simulator that renders 68 FPS single-view on one GB300 and replaces NuRec in a closed-loop AV stack, cutting closed-loop incidents from 10.1% to 4.7%.
Quick answer
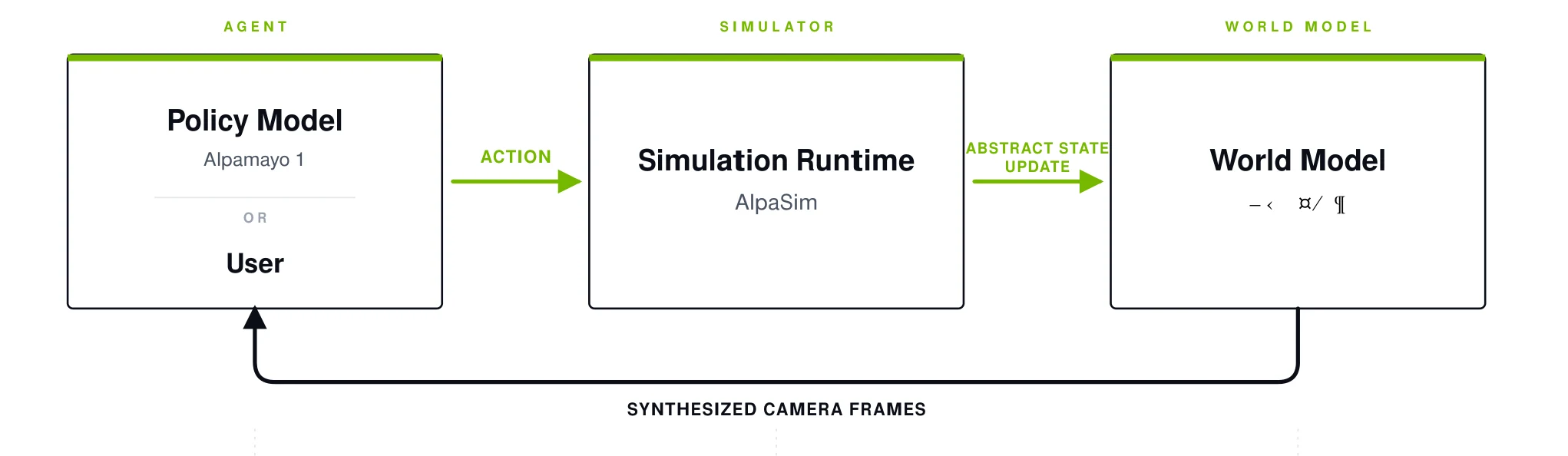
OmniDreams is a generative video simulator for autonomous driving, mid- and post-trained from NVIDIA’s Cosmos diffusion model. It replaces the reconstruction-based NuRec renderer inside the AlpaSim closed-loop stack and reacts to the driving policy’s actions frame by frame. The single-view 2B model renders 68 effective FPS at 704x1280 on one GB300 GPU; the four-view version reaches 105 FPS per camera on a 16-GPU GB300 cabinet. Cosmos supplies the photorealism prior. OmniDreams adds the autoregressive, action-conditioned training and the inference stack that make closed-loop interaction run at frame rate.
What Cosmos gives versus what OmniDreams adds
The base model is Cosmos-Predict 2.5, a pretrained diffusion video model that already carries broad visual priors. OmniDreams does not start from scratch. It mid-trains on 21k hours of real driving logs (the RDS dataset, 3M 20-second clips, plus a curated RDS-HQ-1M set of 1.14M clips across 15 countries) to specialize Cosmos for road scenes and to condition generation on a text prompt, an abstract world-scenario map, and the immediate driving action.
The harder addition is turning a bidirectional video generator into a causal, autoregressive one that can run in a loop. The paper applies Diffusion Forcing with causal masking so each frame attends only to past frames, then distills with Self Forcing and Distribution Matching Distillation down to a 2-step generator. A rolling KV cache lets it generate arbitrarily long rollouts at fixed cost. Without this, a diffusion video model is an offline clip generator, not a simulator a policy can step through.
Why generative beats reconstruction here
Reconstruction-based neural simulators like NuRec fit a 3D Gaussian Splatting model to a specific captured drive. That gives sharp playback near the original trajectory, but the rendering degrades when the policy steers somewhere the capture never went, and it cannot invent agents or weather that were not recorded. OmniDreams generates from a learned distribution, so it can synthesize off-trajectory views, inserted out-of-distribution objects, and rare conditions. The cost is that generation can drift over a long rollout, which is the failure mode reconstruction does not have.
Key results
- Real-time rendering: single-view 2B model produces an 8-frame chunk in 118 ms on one GB300 (68 effective FPS, 704x1280). The four-view model produces a 16-frame chunk in 151 ms on a 16-GPU GB300 cabinet (105 FPS per camera). On a single GPU the four-view chunk takes 1,289 ms (12 FPS).
- Generation quality (RDS-HQ-1M, 1,000 clips): the distilled Self-Forcing model hits FVD 24.8, below the bidirectional teacher’s 26.8 and well below the many-step causal model’s 31.7. It also leads on 3D detection (LET-AP 0.400) and lane-line F1 (0.828) run on its synthesized frames.
- Long rollouts (segmented FVD, 20s): a progressive long-context teacher cuts mean FVD from 240.0 to 179.4 and the first-to-last-window degradation from 299.9 to 172.9. Quality still falls across the rollout (95.5 in the first 5s, 268.4 in the last 5s).
- Closed-loop sim swap (501 scenes, replan every 533 ms): swapping only the sensor simulator, OmniDreams WAM logs 4.7% All Incidents versus 10.1% for full Alpamayo 1.5, 20.9% for a 2-camera variant, and 51.9% for a 1-camera variant.
- Policy backbone (574 scenes): a World-Action Model post-trained from OmniDreams cuts collision rate from 6.9% to 4.2% versus Alpamayo 1.5 (rear 5.3% to 3.0%), using about 2B parameters against roughly 10B.
What the numbers do not prove
The headline 105 FPS needs a 16-GPU GB300 cabinet for four cameras; a single GPU runs the four-view model at 12 FPS, far below real time. Read the single-view 68 FPS figure as the one-GPU number. The closed-loop comparison throttles the policy to OmniDreams’s 533 ms chunk rate, so it is not running a policy at full 10 Hz against the simulator. The “world model beats a 5x larger VLA” claim is labeled preliminary by the authors, is measured on a subset that excludes scenes OmniDreams trained on, and uses NuRec replay as the stand-in for real-world behavior rather than on-road data.
Builder takeaway
If you run AV closed-loop simulation and hit the wall where reconstruction cannot extrapolate off-trajectory or inject rare events, a generative world model is now a working option, not a research demo. The catch is hardware: frame-rate interaction with multi-camera output assumes a GB300-class cabinet, and there is no public code or weights. The World-Action Model result is the more speculative part. It hints that the same generative backbone can drive as well as render, but the evidence is one preliminary closed-loop sweep on a held-out subset.
Limits and open questions
OmniDreams has no public GitHub or released weights, so reproduction depends on Cosmos access and the AlpaSim and Alpamayo stack, which are NVIDIA-internal or partially open. Long-horizon drift remains: even with the progressive teacher, FVD nearly triples from the first 5 seconds to the last in a 20-second rollout. The closed-loop incident numbers treat NuRec replay as a real-world reference, which is reasonable near the recorded trajectory but weakens as rollouts diverge. Whether a World-Action Model trained this way generalizes beyond the NuRec evaluation set is open.
FAQ
What is NVIDIA OmniDreams?
OmniDreams is a generative world model for autonomous-driving simulation, mid- and post-trained from NVIDIA’s Cosmos diffusion model. It autoregressively generates action-conditioned camera video in real time and plugs into the AlpaSim closed-loop stack as the sensor simulator, replacing the reconstruction-based NuRec renderer.
How does OmniDreams reach real-time speed?
The 2B single-view model renders an 8-frame chunk in 118 ms on one GB300 GPU, about 68 FPS at 704x1280. It gets there by distilling the diffusion model to a 2-step generator with Self Forcing, using a fixed-size rolling KV cache, local-window attention, torch.compile with CUDA graphs, and lightweight VAE and TAE codecs. The 105 FPS four-camera figure needs a 16-GPU GB300 cabinet.
How does OmniDreams compare to NuRec in closed-loop tests?
Swapping only the sensor simulator on a 501-scene set, the OmniDreams-derived policy logged 4.7% All Incidents against 10.1% for full Alpamayo 1.5. The paper frames OmniDreams as generating off-trajectory and rare scenes that a reconstruction simulator like NuRec, fit to one captured drive, cannot extrapolate.
Does OmniDreams replace the driving policy too?
Partly, and only as a preliminary result. A World-Action Model post-trained from OmniDreams cut collision rate from 6.9% to 4.2% versus Alpamayo 1.5 with about a fifth of the parameters, on a held-out subset. The authors call this evidence that the same generative backbone could serve as a policy, not a finished driving stack.
One line: OmniDreams is a Cosmos-based generative driving simulator that runs closed-loop at frame rate on GB300 hardware and, in a preliminary result, doubles as a smaller-but-stronger driving policy. Read the original paper on arXiv.