LLM 智能体环境工程综述:八属性八领域
中科院自动化所综述把 LLM 智能体的交互环境按八条属性轴和八个领域归类,再串起建模、合成、评测、协同进化整条流水线。最锋利的判断:现有环境几乎都撑不起多智能体场景。
快速答案
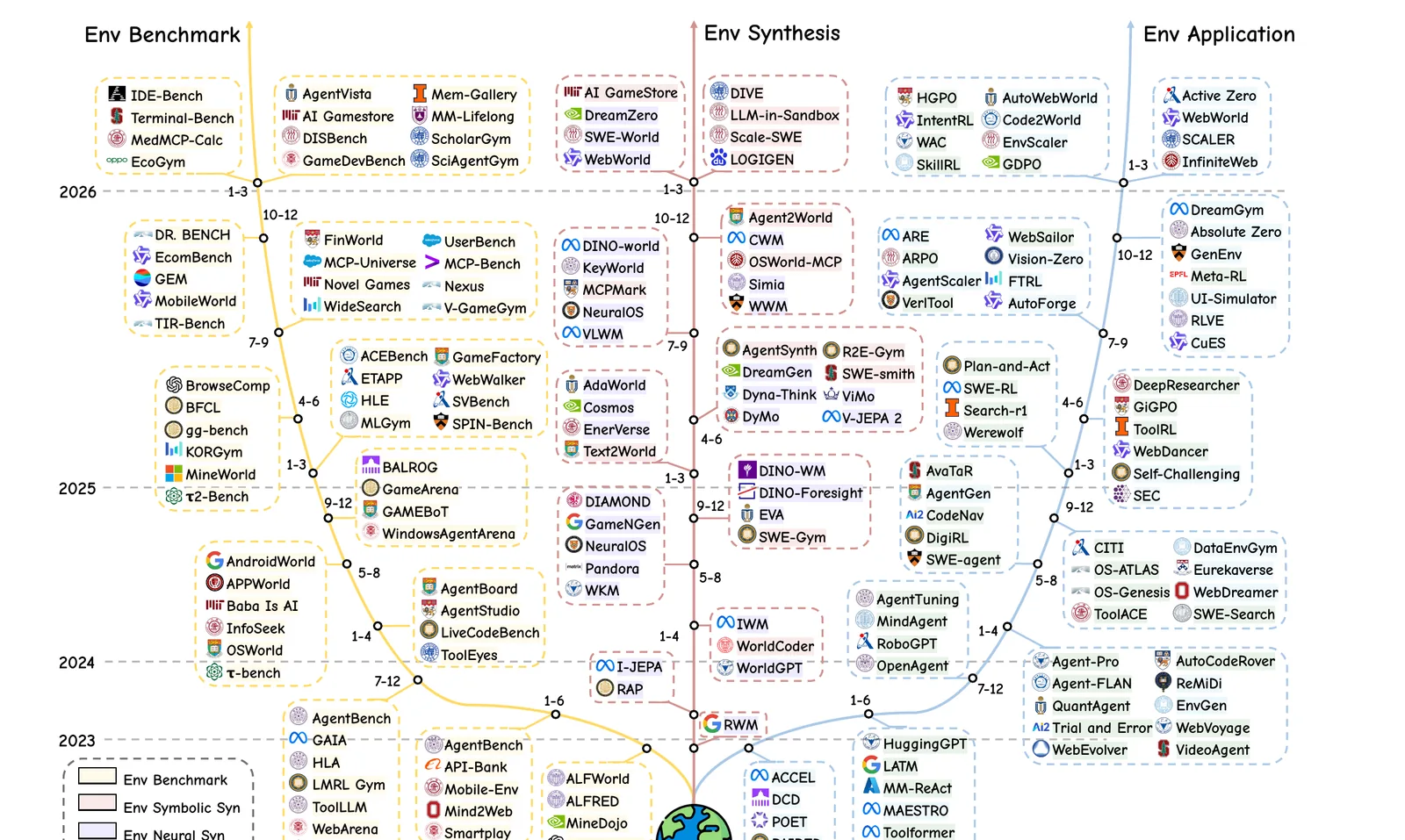
这是中科院自动化所(CASIA)的一篇综述,第一次把 LLM 智能体的”环境”当成一条完整的工程流水线来梳理:建模、合成、评测、应用。值得看的是它那套分类法。它用八条属性轴(比如符号 vs 神经、在线 vs 离线、单智能体 vs 多智能体)加八个领域(GUI、深度研究、具身、游戏、Web/工具、代码、特定领域、跨领域),把大约 145 个有名有姓的环境按规模、模态、可观测性排进对照表。如果你在训练或搭建智能体,看它的”地图”,别指望新的跑分。综述不做实验,没有自己的指标。
最值得引用的一句判断:现有环境基本撑不起多智能体场景,而符号系统的可靠性和神经系统的开放扩展性,至今没人干净地结合起来。这两个缺口才是它的真正贡献,其余是有条理的归档。
八条属性轴和八个领域
建模那一节是整篇的骨架。它没有给一张平铺的清单,而是把环境放在八条成对的轴上:
- 符号 vs 神经(手写规则和 API,还是 LLM 生成的世界)
- 开环 vs 闭环(环境会不会对动作做出反应)
- 在线 vs 离线(实时交互,还是回放静态轨迹)
- MDP vs POMDP(状态全可观测还是部分可观测)
- 确定 vs 非确定的状态转移
- 离散 vs 连续的动作与状态空间
- 单模态 vs 多模态(纯文本,还是带图像和视频)
- 单智能体 vs 多智能体
这些轴有用,是因为它们决定一个环境能训出什么。一个确定、离散、单智能体的网页任务,搭起来便宜、验证容易,但教不了谈判,也教不了部分可观测下的推理。综述接着把环境分进八个领域,每个都列出规模、支持模态(文本/图像/视频)、可观测性、是否支持多智能体、连续性、是否在线,还直接给了 GitHub 或 Hugging Face 链接。熟悉的系统各就各位:WebArena、WebShop、Mind2Web 在 Web/GUI,SWE-bench、SWE-Gym 在代码,ALFWorld、ScienceWorld 在具身,Voyager、Crafter 在游戏。
符号合成 vs 神经合成
合成那一节回答的是搭建者真正会碰到的问题:怎么造出更多环境,又不用一个个手写?综述把自动合成分成两条路。
符号合成靠显式结构来造环境。一类是把已有静态任务套上标准接口;一类是把真实平台(网页、GUI、数据库、游戏)映射成可交互的外壳;还有一类是从逻辑、工具、代码里凑出全新任务。好处是可验证:正确性能确定性地判,这正是强化学习训练需要的。
神经合成用 LLM 或世界模型来生成场景、状态转移,甚至奖励信号。它能扩得更远,覆盖更杂、更开放的情况,但也继承了模型的幻觉,验证起来很难。综述把这个开放问题摆得很直白:符号系统可靠但有边界,神经系统能扩但不忠实,没人把两者干净地拼到一起。它还给合成出来的环境列了四条评价标准:正确性、多样性、复杂度、保真度。
智能体与环境的协同进化
应用那一节是综述态度最明确的地方。它主张环境和智能体是一起变强的,并把智能体的进化拆成四条路径:
- 记忆驱动:智能体攒经验、反复复用(经验进化)。
- 编排驱动:在多次运行里改进工作流和工具调用模式。
- 轨迹驱动:从采集到的交互日志里做离线学习。
- 探索驱动:在活的环境里靠在线探索改进。
环境这一侧也有三条进化路径:神经驱动(世界模型生成更难或更丰富的状态)、难度驱动(随智能体变强而抬高任务难度的课程式设计)、规模驱动(场景级和环境级的扩展,把广度铺开)。展望部分点了三个方向:环境即服务(Environment-as-a-Service)、多智能体环境,以及把符号可验证性和神经生成性融到一起的神经符号环境。
关键结果
这是综述,所以”结果”是分类法和领域级判断,不是指标:
- 范围:建模、合成、评测、应用四个阶段统一进一个框架;八条属性轴加八个领域。
- 目录规模:约 145 个环境条目进了对照表,标注规模、模态、可观测性、多智能体支持、连续性、是否在线,每条都链到对应的 GitHub 或 Hugging Face 仓库。
- 合成分法:两条范式(符号、神经),符号下有三个子类(任务驱动、真实世界驱动、从零合成),加四条评价标准(正确性、多样性、复杂度、保真度)。
- 协同进化结构:四条智能体进化路径加三条环境进化路径。
- 最锋利的判断:现有环境撑不起多智能体场景,符号可靠性和神经扩展性之间的取舍仍未解决。
局限与存疑
这篇综述是一张快照,缺口也写在表里。被收录的环境大多是单智能体、确定、离散的,因为这类最好搭、最好验,所以分类法可能把这个领域显得比实际更宽。同样的选择偏差砸在多智能体那一列上:它薄,不是因为综述漏了工作,是因为这领域本身没产出多少。于是”撑不起多智能体”这个标题,一半是发现,一半是现状的副产品。
第二个缺口是实证。综述断言符号环境可靠、神经环境可扩,但它两边都没量。没有一个共享基准,把同一个任务的符号版和神经版放在正确性或迁移上对比,所以核心取舍始终停在定性论证。保真度这条尤其明显:它被点名了,却没被操作化,到底怎么打分一个神经合成的环境忠不忠实于它模仿的世界?
最后,分类法只有能预测点什么才有用。这领域能做、而综述做不了的最强检验是:在某条属性轴高端训练的智能体,迁移到真实部署时,是不是真的比在每条轴便宜可验证那一端训练的更好。在这个证据出现之前,这八条轴是一套干净的归档系统,还不是一套被验证过的”什么样的环境能训出好智能体”的理论。
常见问题
智能体环境工程综述到底讲了什么?
它把 LLM 智能体的环境组织成一条工程流水线:建模(八条属性轴、八个领域)、自动合成(符号与神经)、评测、应用(智能体与环境的协同进化)。它把约 145 个环境(如 WebArena、SWE-bench、ALFWorld、Voyager)按属性和仓库链接编入对照表。
这篇综述用哪八条属性来分类智能体环境,方法是什么?
八条成对的轴是:符号 vs 神经、开环 vs 闭环、在线 vs 离线、MDP vs POMDP、确定 vs 非确定、离散 vs 连续、单模态 vs 多模态、单智能体 vs 多智能体。每条轴决定环境能训什么,确定的单智能体文本任务便宜又好验,却教不了部分可观测推理或谈判。
这篇智能体环境综述里符号合成和神经合成有什么区别?
符号合成靠显式结构造环境(套静态任务、映射真实平台、或从逻辑和代码凑任务),正确性能确定性地判。神经合成用 LLM 或世界模型生成场景和奖励,能扩到开放情况,但带着幻觉、难验证。综述把两者结合称为开放问题。
这篇综述的局限在哪,为什么说现有环境撑不起多智能体场景?
大多数被收录的环境是单智能体的,因为更好搭、更好做确定性验证。综述表里多智能体那一列很薄,所以它把多智能体环境和环境即服务列为优先方向。这个结论一半是真缺口,一半是这领域目前产出的副产品。
一句话:这篇 CASIA 综述是当前 LLM 智能体环境最干净的一张地图,强在分类法和找缺口(多智能体、神经符号融合),弱在它点了一堆取舍却一个都没量。读原始论文(arXiv)。